Sorting is a very classic problem of reordering items (that can be compared, e.g., integers, floating-point numbers, strings, etc) of an array (or a list) in a certain order (increasing, non-decreasing (increasing or flat), decreasing, non-increasing (decreasing or flat), lexicographical, etc).
There are many different sorting algorithms, each has its own advantages and limitations.
Sorting is commonly used as the introductory problem in various Computer Science classes to showcase a range of algorithmic ideas.
Without loss of generality, we assume that we will sort only Integers, not necessarily distinct, in non-decreasing order in this visualization. Try clicking for a sample animation of sorting the list of 5 jumbled integers (with duplicate) above.
Sorting problem has a variety of interesting algorithmic solutions that embody many Computer Science ideas:
When an (integer) array A is sorted, many problems involving A become easy (or easier), please review the applications, the slower/harder unsorted array solutions, and the faster/easier sorted array solutions.
There are two actions that you can do in this visualization.
The first action is about defining your own input, an array/a list A that is:
In Exploration mode, you can experiment with various sorting algorithms provided in this visualization to figure out their best and worst case inputs.
The second action is the most important one: Execute the active sorting algorithm by clicking the "Sort" button.
Remember that you can switch active algorithm by clicking the respective abbreviation on the top side of this visualization page.
View the visualisation/animation of the chosen sorting algorithm here.
Without loss of generality, we only show Integers in this visualization and our objective is to sort them from the initial state into non-decreasing order state. Remember, non-decreasing means mostly ascending (or increasing) order, but because there can be duplicates, there can be flat/equal line between two adjacent equal integers.
At the top, you will see the list of commonly taught sorting algorithms in Computer Science classes. To activate each algorithm, select the abbreviation of respective algorithm name before clicking "Sort".
To facilitate more diversity, we randomize the active algorithm upon each page load.
The first six algorithms in this module are comparison-based sorting algorithms while the last two are not. We will discuss this idea midway through this e-Lecture.
The middle three algorithms are recursive sorting algorithms while the rest are usually implemented iteratively.
To save screen space, we abbreviate algorithm names into three characters each:
We will discuss three comparison-based sorting algorithms in the next few slides:
They are called comparison-based as they compare pairs of elements of the array and decide whether to swap them or not.
These three sorting algorithms are the easiest to implement but also not the most efficient, as they run in O(N2).
Before we start with the discussion of various sorting algorithms, it may be a good idea to discuss the basics of asymptotic algorithm analysis, so that you can follow the discussions of the various O(N^2), O(N log N), and special O(N) sorting algorithms later.
This section can be skipped if you already know this topic.
You need to already understand/remember all these:
-. Logarithm and Exponentiation, e.g., log2(1024) = 10, 210 = 1024
-. Arithmetic progression, e.g., 1+2+3+4+…+10 = 10*11/2 = 55
-. Geometric progression, e.g., 1+2+4+8+..+1024 = 1*(1-211)/(1-2) = 2047
-. Linear/Quadratic/Cubic function, e.g., f1(x) = x+2, f2(x) = x2+x-1, f3(x) = x3+2x2-x+7
-. Ceiling, Floor, and Absolute function, e.g., ceil(3.1) = 4, floor(3.1) = 3, abs(-7) = 7
Analysis of Algorithm is a process to evaluate rigorously the resources (time and space) needed by an algorithm and represent the result of the evaluation with a (simple) formula.
The time/space requirement of an algorithm is also called the time/space complexity of the algorithm, respectively.
For this module, we focus more on time requirement of various sorting algorithms.
We can measure the actual running time of a program by using wall clock time or by inserting timing-measurement code into our program, e.g., see the code shown in SpeedTest.cpp | py | java.
However, actual running time is not meaningful when comparing two algorithms as they are possibly coded in different languages, using different data sets, or running on different computers.
Instead of measuring the actual timing, we count the # of operations (arithmetic, assignment, comparison, etc). This is a way to assess its efficiency as an algorithm's execution time is correlated to the # of operations that it requires.
See the code shown in SpeedTest.cpp | py | java and the comments (especially on how to get the final value of variable counter).
Knowing the (precise) number of operations required by the algorithm, we can state something like this: Algorithm X takes 2n2 + 100n operations to solve problem of size n.
If the time t needed for one operation is known, then we can state that algorithm X takes (2n2 + 100n)t time units to solve problem of size n.
However, time t is dependent on the factors mentioned earlier, e.g., different languages, compilers and computers, the complexity of the operation itself (addition/subtraction is easier/faster to compute than multiplication/division), etc.
Therefore, instead of tying the analysis to actual time t, we can state that algorithm X takes time that is proportional to 2n2 + 100n to solving problem of size n.
Asymptotic analysis is an analysis of algorithms that focuses on analyzing problems of large input size n, considers only the leading term of the formula, and ignores the coefficient of the leading term.
We choose the leading term because the lower order terms contribute lesser to the overall cost as the input grows larger, e.g., for f(n) = 2n2 + 100n, we have:
f(1000) = 2*10002 + 100*1000 = 2.1M, vs
f(100000) = 2*1000002 + 100*100000 = 20010M.
(notice that the lower order term 100n has lesser contribution).
Suppose two algorithms have 2n2 and 30n2 as the leading terms, respectively.
Although actual time will be different due to the different constants, the growth rates of the running time are the same.
Compared with another algorithm with leading term of n3, the difference in growth rate is a much more dominating factor.
Hence, we can drop the coefficient of leading term when studying algorithm complexity.
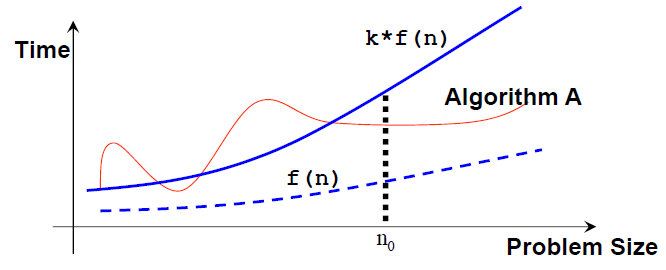
If algorithm A requires time proportional to f(n), we say that algorithm A is of the order of f(n).
We write that algorithm A has time complexity of O(f(n)), where f(n) is the growth rate function for algorithm A.
Mathematically, an algorithm A is of O(f(n)) if there exist a constant k and a positive integer n0 such that algorithm A requires no more than k*f(n) time units to solve a problem of size n ≥ n0, i.e., when the problem size is larger than n0, then algorithm A is (always) bounded from above by this simple formula k*f(n).
Note that: n0 and k are not unique and there can be many possible valid f(n).
In asymptotic analysis, a formula can be simplified to a single term with coefficient 1.
Such a term is called a growth term (rate of growth, order of growth, order of magnitude).
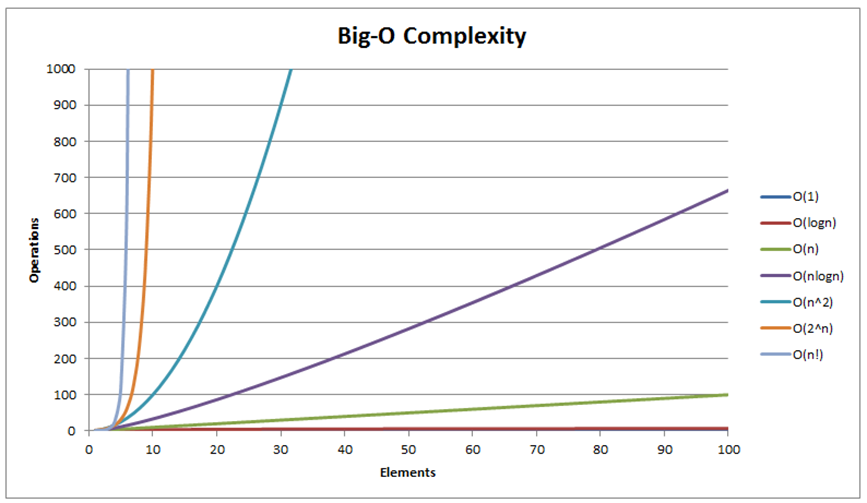
The most common growth terms can be ordered from fastest to slowest as follows:
O(1)/constant time < O(log n)/logarithmic time < O(n)/linear time <
O(n log n)/quasilinear time < O(n2)/quadratic time < O(n3)/cubic time <
O(2n)/exponential time < O(n!)/also-exponential time < ∞ (e.g., an infinite loop).
Note that a few other common time complexities are not shown (also see the visualization in the next slide).
We will see three different growth rates O(n2), O(n log n), and O(n) throughout the remainder of this sorting module.
Given an array of N elements, Bubble Sort will:
Without further ado, let's try on the small example array [29, 10, 14, 37, 14].
You should see a 'bubble-like' animation if you imagine the larger items 'bubble up' (actually 'float to the right side of the array').
method bubbleSort(array A, integer N) // the standard version
for each R from N-1 down to 1 // repeat for N-1 iterations
for each index i in [0..R-1] // the 'unsorted region', O(N)
if A[i] > A[i+1] // these two are not in non-decreasing order
swap(a[i], a[i+1]) // swap them in O(1)
Comparison and swap require time that is bounded by a constant, let's call it c. Then, there are two nested loops in (the standard) Bubble Sort. The outer loop runs for exactly N-1 iterations. But the inner loop runs get shorter and shorter:
Thus, the total number of iterations = (N−1)+(N−2)+...+1 = N*(N−1)/2 (derivation).
Total time = c*N*(N−1)/2 = O(N^2).
See the code shown in SortingDemo.cpp | py | java.
Bubble Sort is actually inefficient with its O(N^2) time complexity. Imagine that we have N = 105 numbers. Even if our computer is super fast and can compute 108 operations in 1 second, Bubble Sort will need about 100 seconds to complete.
However, it can be terminated early, e.g., on the small sorted ascending example shown above [3, 6, 11, 25, 39], can terminates in O(N) time.
The improvement idea is simple: If we go through the inner loop with no swapping at all, it means that the array is already sorted and we can stop Bubble Sort at that point.
Discussion: Although it makes Bubble Sort runs faster in general cases, this improvement idea does not change O(N^2) time complexity of Bubble Sort... Why?
Given an array of N items and L = 0, Selection Sort will:
Let's try on the same small example array [29, 10, 14, 37, 13].
Without loss of generality, we can also implement Selection Sort in reverse:
Find the position of the largest item Y and swap it with the last item.
method selectionSort(array A[], integer N)
for each L in [0..N-2] // O(N)
let X be the index of the minimum element in A[L..N-1] // O(N)
swap(A[X], A[L]) // O(1), X may be equal to L (no actual swap)
Total: O(N2) — To be precise, it is similar to Bubble Sort analysis.
See the code shown in SortingDemo.cpp | py | java.
Quiz: How many (real) swaps are required to sort [29, 10, 14, 37, 13] by Selection Sort?
Insertion sort is similar to how most people arrange a hand of poker cards. 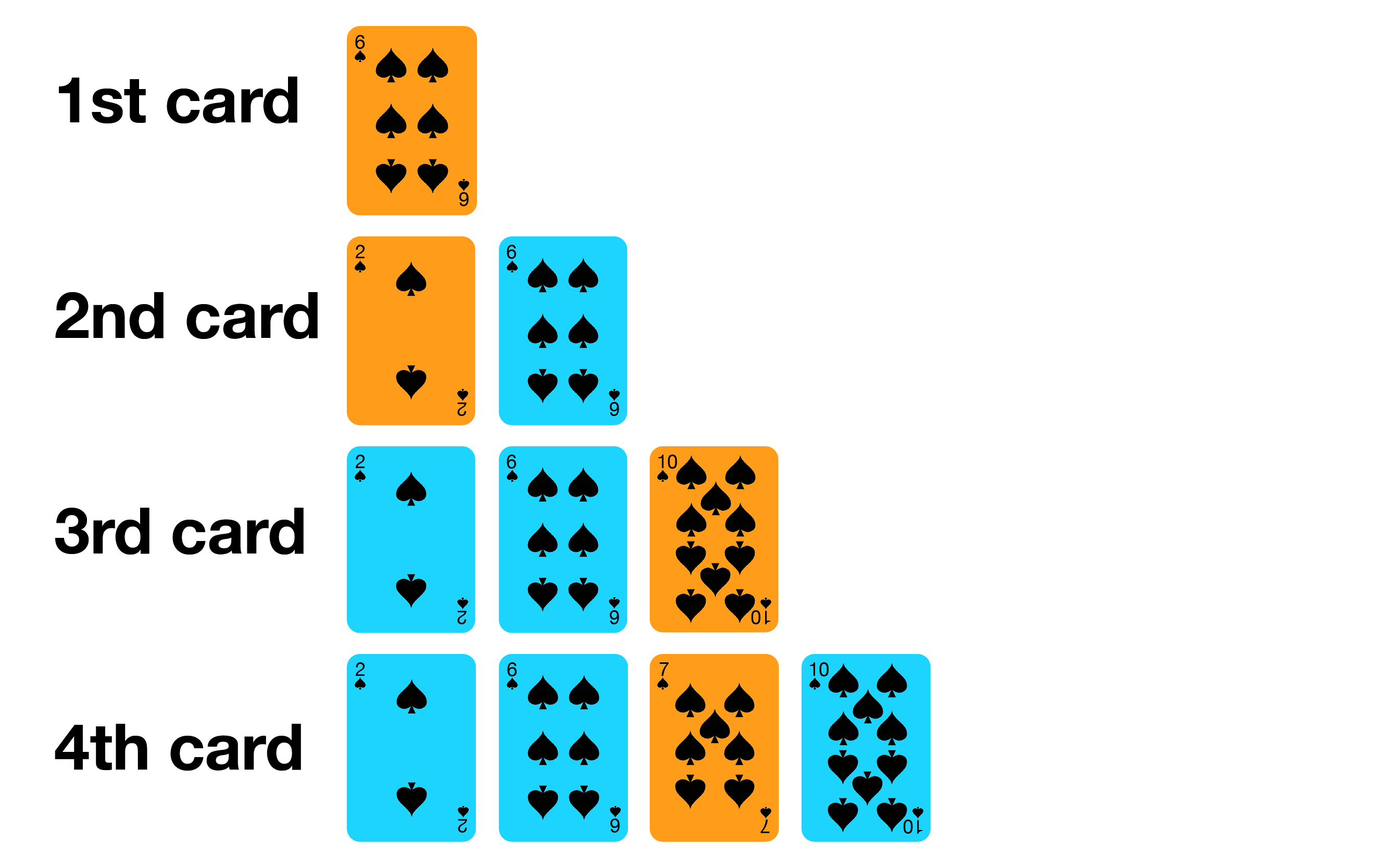
Let's try on the small example array [6, 2, 10, 7].
method insertionSort(array A[], integer N)
for i in [1..N-1] // O(N)
let X be A[i] // X is the next item to be inserted into A[0..i-1]
for j from i-1 down to 0 // this loop can be fast or slow
if A[j] > X
A[j+1] = A[j] // make a place for X
else
break
A[j+1] = X // insert X at index j+1
See the code shown in SortingDemo.cpp | py | java.
The outer loop executes N−1 times, that's quite clear.
But the number of times the inner-loop is executed depends on the input:
Thus, the best-case time is O(N × 1) = O(N) and the worst-case time is O(N × N) = O(N2).
Quiz: What is the complexity of Insertion Sort on any input array?
Ask your instructor if you are not clear on this or read similar remarks on this slide.
We will discuss two (and a half) comparison-based sorting algorithms soon:
These sorting algorithms are usually implemented recursively, use Divide and Conquer problem solving paradigm, and run in O(N log N) time for Merge Sort and O(N log N) time in expectation for Randomized Quick Sort.
PS: The non-randomized version of Quick Sort runs in O(N2) though.
Given an array of N items, Merge Sort will:
This is just the general idea and we need a few more details before we can discuss the true form of Merge Sort.
We will dissect this Merge Sort algorithm by first discussing its most important sub-routine: The O(N) merge.
Given two sorted array, A and B, of size N1 and N2, we can efficiently merge them into one larger combined sorted array of size N = N1+N2, in O(N) time.
This is achieved by simply comparing the front of the two arrays and take the smaller of the two at all times. However, this simple but fast O(N) merge sub-routine will need additional array to do this merging correctly.
method merge(array A, integer low, integer mid, integer high)
// subarray1 = a[low..mid], subarray2 = a[mid+1..high], both sorted
int N = high-low+1
create array B of size N // discuss: why do we need a temp array b?
int left = low, right = mid+1, bIdx = 0
while (left <= mid && right <= high) // the merging
if (A[left] <= A[right])
B[bIdx++] = A[left++]
else
B[bIdx++] = A[right++]
while (left <= mid)
B[bIdx++] = A[left++] // leftover, if any
while (right <= high)
B[bIdx++] = A[right++] // leftover, if any
for (int k = 0; k < N; ++k)
A[low+k] = B[k]; // copy back
Try on the example array [1, 5, 19, 20, 2, 11, 15, 17] that have its first half already sorted [1, 5, 19, 20] and its second half also already sorted [2, 11, 15, 17]. Concentrate on the last merge of the Merge Sort algorithm.
Before we continue, let's talk about Divide and Conquer (abbreviated as D&C), a powerful problem solving paradigm.
Divide and Conquer algorithm solves (certain kind of) problem — like our sorting problem — in the following steps:
Merge Sort is a Divide and Conquer sorting algorithm.
The divide step is simple: Divide the current array into two halves (perfectly equal if N is even or one side is slightly greater by one element if N is odd) and then recursively sort the two halves.
The conquer step is the one that does the most work: Merge the two (sorted) halves to form a sorted array, using the merge sub-routine discussed earlier.
method mergeSort(array A, integer low, integer high)
// the array to be sorted is A[low..high]
if (low < high) // base case: low >= high (0 or 1 item)
int mid = (low+high) / 2
mergeSort(a, low , mid ) // divide into two halves
mergeSort(a, mid+1, high) // then recursively sort them
merge(a, low, mid, high) // conquer: the merge subroutine
See the code shown in SortingDemo.cpp | py | java.
Contrary to what many other CS printed textbooks usually show (as textbooks are static), the actual execution of Merge Sort does not split to two subarrays level by level, but it will recursively sort the left subarray first before dealing with the right subarray.
That's it, running on the example array [7, 2, 6, 3, 8, 4, 5], it will recurse to [7, 2, 6, 3], then [7, 2], then [7] (a single element, sorted by default), backtrack, recurse to [2] (sorted), backtrack, then finally merge [7, 2] into [2, 7], before it continue processing [6, 3] and so on.
In Merge Sort, the bulk of work is done in the conquer/merge step as the divide step does not really do anything (treated as O(1)).
When we call merge(a, low, mid, high), we process k = (high-low+1) items.
There will be at most k-1 comparisons.
There are k moves from original array a to temporary array b and another k moves back.
In total, number of operations inside merge sub-routine is < 3k-1 = O(k).
The important question is how many times this merge sub-routine is called?
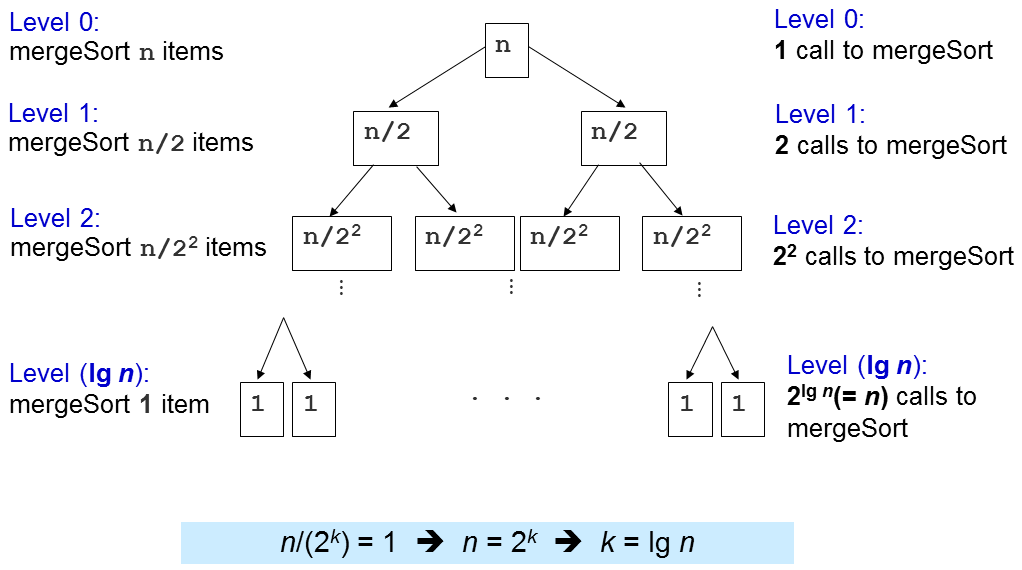
Level 1: 2^0=1 calls to merge() with N/2^1 items each, O(2^0 x 2 x N/2^1) = O(N)
Level 2: 2^1=2 calls to merge() with N/2^2 items each, O(2^1 x 2 x N/2^2) = O(N)
Level 3: 2^2=4 calls to merge() with N/2^3 items each, O(2^2 x 2 x N/2^3) = O(N)
...
Level (log N): 2^(log N-1) (or N/2) calls to merge() with N/2^log N (or 1) item each, O(N)
There are log N levels and in each level, we perform O(N) work, thus the overall time complexity is O(N log N). We will later see that this is an optimal (comparison-based) sorting algorithm, i.e., we cannot do better than this.
The most important good part of Merge Sort is its O(N log N) performance guarantee, regardless of the original ordering of the input. That's it, there is no adversary test case that can make Merge Sort runs longer than O(N log N) for any array of N elements.
Merge Sort is therefore very suitable to sort extremely large number of inputs as O(N log N) grows much slower than the O(N2) sorting algorithms that we have discussed earlier.
There are however, several not-so-good parts of Merge Sort. First, it is actually not easy to implement from scratch (but we don't have to). Second, it requires additional O(N) storage during merging operation, thus not really memory efficient and not in-place. Btw, if you are interested to see what have been done to address these (classic) Merge Sort not-so-good parts, you can read this.
Merge Sort is also a stable sort algorithm. Discussion: Why?
Quick Sort is another Divide and Conquer sorting algorithm (the other one discussed in this visualization page is Merge Sort).
We will see that this deterministic, non randomized version of Quick Sort can have bad time complexity of O(N2) on adversary input before continuing with the randomized and usable version later.
Divide step: Choose an item p (known as the pivot)
Then partition the items of A[i..j] into three parts: A[i..m-1], A[m], and A[m+1..j].
A[i..m-1] (possibly empty) contains items that are smaller than (or equal to) p.
A[m] = p, i.e., index m is the correct position for p in the sorted order of array a.
A[m+1..j] (possibly empty) contains items that are greater than (or equal to) p.
Then, recursively sort the two parts.
Conquer step: Don't be surprised... We do nothing :O!
If you compare this with Merge Sort, you will see that Quick Sort D&C steps are totally opposite with Merge Sort.
We will dissect this Quick Sort algorithm by first discussing its most important sub-routine: The O(N) partition (classic version).
To partition A[i..j], we first choose A[i] as the pivot p.
The remaining items (i.e., A[i+1..j]) are divided into 3 regions:
Discussion: Why do we choose p = A[i]? Are there other choices?
Harder Discussion: If A[k] == p, should we put it in region S1 or S2?
Initially, both S1 and S2 regions are empty, i.e., all items excluding the designated pivot p are in the unknown region.
Then, for each item A[k] in the unknown region, we compare A[k] with p and decide one of the three cases:
These three cases are elaborated in the next two slides.
Lastly, we swap A[i] and A[m] to put pivot p right in the middle of S1 and S2.
![Case when a[k] ≥ p, increment k, extend S2 by 1 item](https://visualgo.net/img/partition1.png)
![Case when a[k] < p, increment m, swap a[k] with a[m], increment k, extend S1 by 1 item](https://visualgo.net/img/partition2.png)
int partition(array A, integer i, integer j)
int p = a[i] // p is the pivot
int m = i // S1 and S2 are initially empty
for (int k = i+1; k <= j; ++k) // explore the unknown region
if ((A[k] < p) || ((A[k] == p) && (rand()%2 == 0))) { // case 2+3
++m
swap(A[k], A[m]) // exchange these two indices
// notice that we do nothing in case 1: A[k] > p
swap(A[i], A[m]) // final step, swap pivot with a[m]
return m // return the index of pivot
method quickSort(array A, integer low, integer high)
if (low < high)
int m = partition(a, low, high) // O(N)
// A[low..high] ~> A[low..m–1], pivot, A[m+1..high]
quickSort(A, low, m-1); // recursively sort left subarray
// A[m] = pivot is already sorted after partition
quickSort(A, m+1, high); // then sort right subarray
See the code shown in SortingDemo.cpp | py | java.
Try on example array [27, 38, 12, 39, 29, 16]. We shall elaborate the first partition step as follows:
We set p = A[0] = 27.
We set A[1] = 38 as part of S2 so S1 = {} and S2 = {38}.
We swap A[1] = 38 with A[2] = 12 so S1 = {12} and S2 = {38}.
We set A[3] = 39 and later A[4] = 29 as part of S2 so S1 = {12} and S2 = {38,39,29}.
We swap A[2] = 38 with A[5] = 16 so S1 = {12,16} and S2 = {39,29,38}.
We swap p = A[0] = 27 with A[2] = 16 so S1 = {16,12}, p = {27}, and S2 = {39,29,38}.
After this, A[2] = 27 is guaranteed to be sorted and now Quick Sort recursively sorts the left side A[0..1] first and later recursively sorts the right side A[3..5].
First, we analyze the cost of one call of partition.
Inside partition(A, i, j), there is only a single for-loop that iterates through (j-i) times. As j can be as big as N-1 and i can be as low as 0, then the time complexity of partition is O(N).
Similar to Merge Sort analysis, the time complexity of Quick Sort is then dependent on the number of times partition(A, i, j) is called.
When the array A is already in ascending order, e.g., A = [5, 18, 23, 39, 44, 50], will set p = A[0] = 5, and will return m = 0, thereby making S1 region empty and S2 region: Everything else other than the pivot (N-1 items).
On such worst case input scenario, this is what happens:
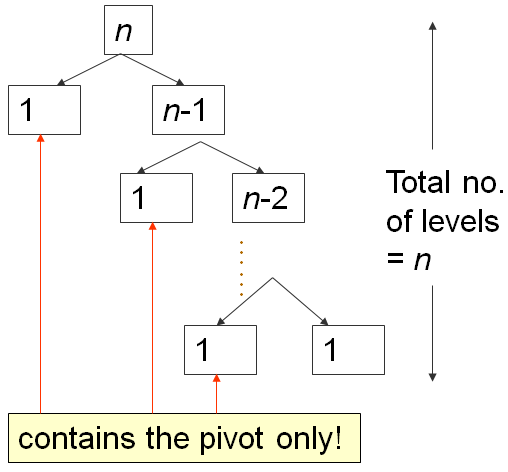
The first partition takes O(N) time, splits A into 0, 1, N-1 items, then recurse right.
The second one takes O(N-1) time, splits A into 0, 1, N-2 items, then recurse right again.
...
Until the last, N-th partition splits A into 0, 1, 1 item, and Quick Sort recursion stops.
This is the classic N+(N-1)+(N-2)+...+1 pattern, which is O(N2), similar analysis as the one in this Bubble Sort analysis slide...
The best case scenario of Quick Sort occurs when partition always splits the array into two equal halves, like Merge Sort.
When that happens, the depth of recursion is only O(log N).
As each level takes O(N) comparisons, the time complexity is O(N log N).
Try on this hand-crafted example input array [4, 1, 3, 2, 6, 5, 7].
In practice, this is rare, thus we need to devise a better way: Randomized Quick Sort.
Same as Quick Sort except just before executing the partition algorithm, it randomly select the pivot between A[i..j] instead of always choosing A[i] (or any other fixed index between [i..j]) deterministically.
Mini exercise: Implement the idea above to the implementation shown in this slide!
Running on this large and somewhat random example array a = [3,44,38,5,47,15,36,26,27,2,46,4,19,50,48] feels fast.
It will take about 1 hour lecture to properly explain why this randomized version of Quick Sort has expected time complexity of O(N log N) on any input array of N elements.
In this e-Lecture, we will assume that it is true.
If you need non formal explanation: Just imagine that on randomized version of Quick Sort that randomizes the pivot selection, we will not always get extremely bad split of 0 (empty), 1 (pivot), and N-1 other items. This combination of lucky (half-pivot-half), somewhat lucky, somewhat unlucky, and extremely unlucky (empty, pivot, the rest) yields an average time complexity of O(N log N).
Discussion: For the implementation of Partition, what happen if A[k] == p, we always put A[k] on either side (S1 or S2) deterministically?
We will discuss two non comparison-based sorting algorithms in the next few slides:
These sorting algorithms can be faster than the lower bound of comparison-based sorting algorithm of Ω(N log N) by not comparing the items of the array.
It is known (also not proven in this visualization as it will take about half-an-hour lecture about decision tree model to do so) that all comparison-based sorting algorithms have a lower bound time complexity of Ω(N log N).
Thus, any comparison-based sorting algorithm with worst-case complexity O(N log N), like Merge Sort is considered an optimal algorithm, i.e., we cannot do better than that.
However, we can achieve faster sorting algorithm — i.e., in O(N) — if certain assumptions of the input array exist and thus we can avoid comparing the items to determine the sorted order.
Assumption: If the items to be sorted are Integers with small range, we can count the frequency of occurrence of each Integer (in that small range) and then loop through that small range to output the items in sorted order.
Try on the example array above where all Integers are within [1..9], thus we just need to count how many times Integer 1 appears, Integer 2 appears, ..., Integer 9 appears, and then loop through 1 to 9 to print out x copies of Integer y if frequency[y] = x.
The time complexity is O(N) to count the frequencies and O(N+k) to print out the output in sorted order where k is the range of the input Integers, which is 9-1+1 = 9 in this example. The time complexity of Counting Sort is thus O(N+k), which is O(N) if k is small.
We will not be able to do the counting part of Counting Sort when k is relatively big due to memory limitation, as we need to store frequencies of those k integers.
PS: This version of Counting Sort is not stable, as it does not actually remember the (input) ordering of duplicate integers. The version presented in CLRS is stable, but is a bit more complex than this form.
Assumption: If the items to be sorted are Integers with large range but of few digits, we can combine Counting Sort idea with Radix Sort to achieve the linear time complexity.
In Radix Sort, we treat each item to be sorted as a string of w digits (we pad Integers that have less than w digits with leading zeroes if necessary).
For the least significant (rightmost) digit to the most significant digit (leftmost), we pass through the N items and put them according to the active digit into 10 Queues (one for each digit [0..9]), which is like a modified Counting Sort as this one preserves stability (remember, the Counting Sort version shown in this slide earlier is not a stable sort). Then we re-concatenate the groups again for subsequent iteration.
Try on the random 4-digits array above for clearer explanation.
Notice that we only perform O(w × (N+k)) iterations. In this example, w = 4 and k = 10.
Now, having discussed about Radix Sort, should we use it for every sorting situation?
For example, it should be theoretically faster to sort many (N is very large) 32-bit signed integers as w ≤ 10 digits and k = 10 if we interpret those 32-bit signed integers in Decimal. O(10 × (N+10)) = O(N).
Discussion: Using base-10 as shown in this visualization is actually not the best way to sort N 32-bit signed integers. What should be the better setup?
There are a few other properties that can be used to differentiate sorting algorithms on top of whether they are comparison or non-comparison, recursive or iterative.
In this section, we will talk about in-place versus not in-place, stable versus not stable, and caching performance of sorting algorithms.
A sorting algorithm is said to be an in-place sorting algorithm if it requires only a constant amount (i.e., O(1)) of extra space during the sorting process. That's it, a few, constant number of extra variables is OK but we are not allowed to have variables that has variable length depending on the input size N.
Merge Sort (the classic version), due to its merge sub-routine that requires additional temporary array of size N, is not in-place.
Discussion: How about Bubble Sort, Selection Sort, Insertion Sort, Quick Sort (randomized or not), Counting Sort, and Radix Sort. Which ones are in-place?
A sorting algorithm is called stable if the relative order of elements with the same key value is preserved by the algorithm after sorting is performed.
Example application of stable sort: Assume that we have student names that have been sorted in alphabetical order. Now, if this list is sorted again by tutorial group number (recall that one tutorial group usually has many students), a stable sort algorithm would ensure that all students in the same tutorial group still appear in alphabetical order of their names. Radix sort that goes through multiple round of sorts digit-by-digit requires a stable sort sub-routine for it to work correctly.
Discussion: Which of the sorting algorithms discussed in this e-Lecture are stable?
Try sorting array A = {3, 4a, 2, 4b, 1}, i.e. there are two copies of 4 (4a first, then 4b).
We are nearing the end of this e-Lecture.
Time for a few simple questions.
Quiz: Which of these algorithms run in O(N log N) on any input array of size N?
Quiz: Which of these algorithms has worst case time complexity of Θ(N^2) for sorting N integers?
Insertion SortΘ is a tight time complexity analysis where the best case Ω and the worst case big-O analysis match.
We have reached the end of sorting e-Lecture.
However, there are two other sorting algorithms in VisuAlgo that are embedded in other data structures: Heap Sort and Balanced BST Sort. We will discuss them when you go through the e-Lecture of those two data structures.
Actually, the C++ source code for many of these basic sorting algorithms are already scattered throughout these e-Lecture slides. For other programming languages, you can translate the given C++ source code to the other programming language.
Usually, sorting is just a small part in problem solving process and nowadays, most of programming languages have their own sorting functions so we don't really have to re-code them unless absolutely necessary.
In C++, you can use std::sort (most likely a hybrid sorting algorithm: Introsort), std::stable_sort (most likely Merge Sort), or std::partial_sort (most likely Binary Heap) in STL algorithm.
In Python, you can use sort (most likely a hybrid sorting algorithm: Timsort).
In Java, you can use Collections.sort.
In OCaml, you can use List.sort compare list_name.
If the comparison function is problem-specific, we may need to supply additional comparison function to those built-in sorting routines.
Now it is time for you to see if you have understand the basics of various sorting algorithms discussed so far.
Test your understanding here.
Now that you have reached the end of this e-Lecture, do you think sorting problem is just as simple as calling built-in sort routine?
Try these online judge problems to find out more:
Kattis - mjehuric
Kattis - sortofsorting, or
Kattis - sidewayssorting
This is not the end of the topic of sorting. When you explore other topics in VisuAlgo, you will realise that sorting is a pre-processing step for many other advanced algorithms for harder problems, e.g. as the pre-processing step for Kruskal's algorithm, creatively used in Suffix Array data structure, etc.
start of 3230 material